
")
ACT Standard Bundle
ACT complete including Residual Bus Simulation (RBS)
The Automotive Configuration Tool (ACT) is a powerful and easy to use PC software package for the FRC-EP Embedded Platforms with versatile functions.
This software bundle includes the following components:
- Gateway - Gateway & Bridging
- Logger - Datalogger & Trigger
- Matlab & EtherCAT - Matlab/Simulink & EtherCAT
- Residual Bus Simulatie (RBS) - Berichtstimulatie
- Basis - IxAdmin, Editor, Visualisatie en Ontwikkelgereedschap
Functions & Modules
Detail overview of the functions and modules in this bundle:
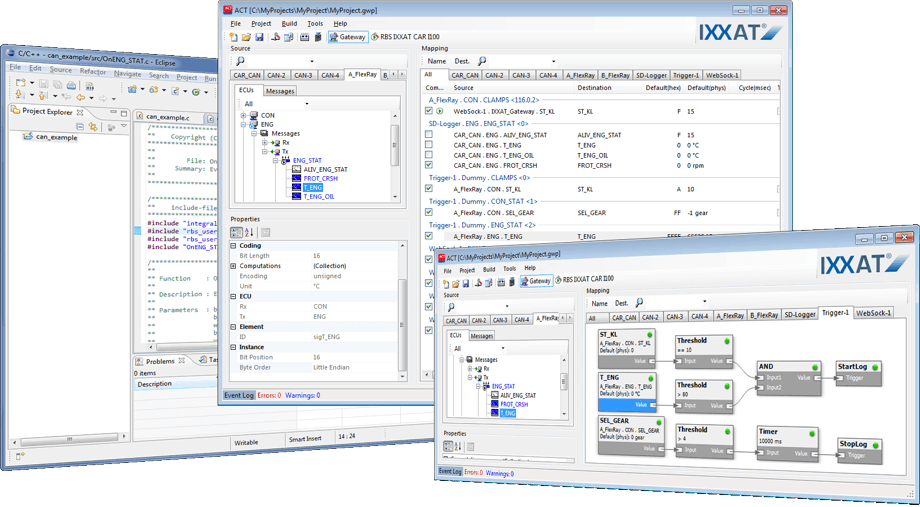
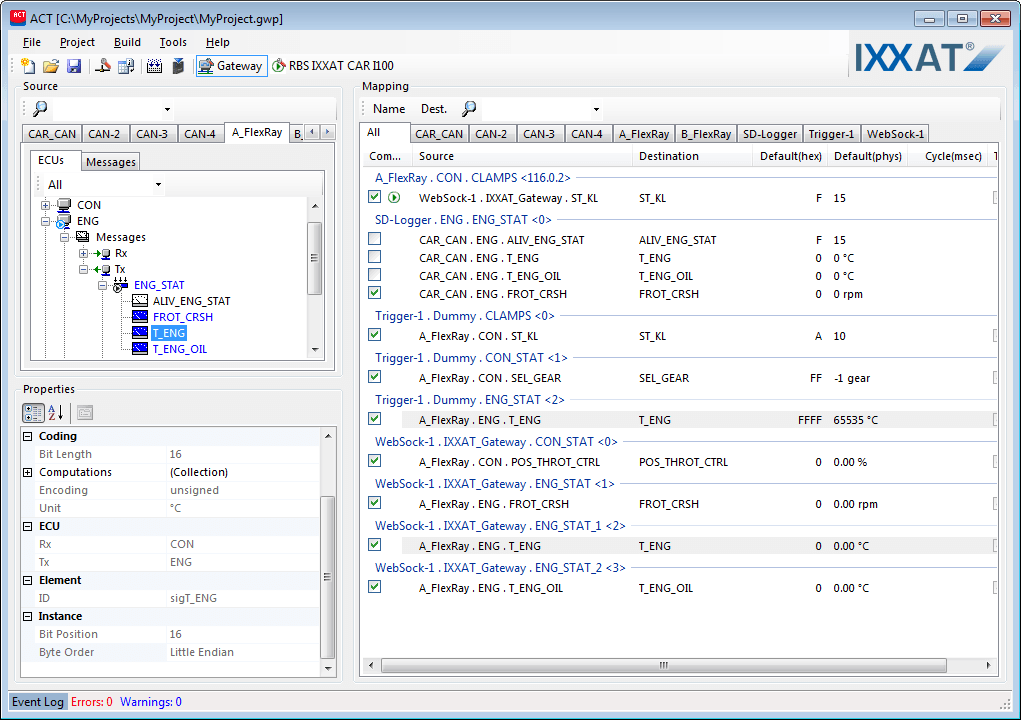
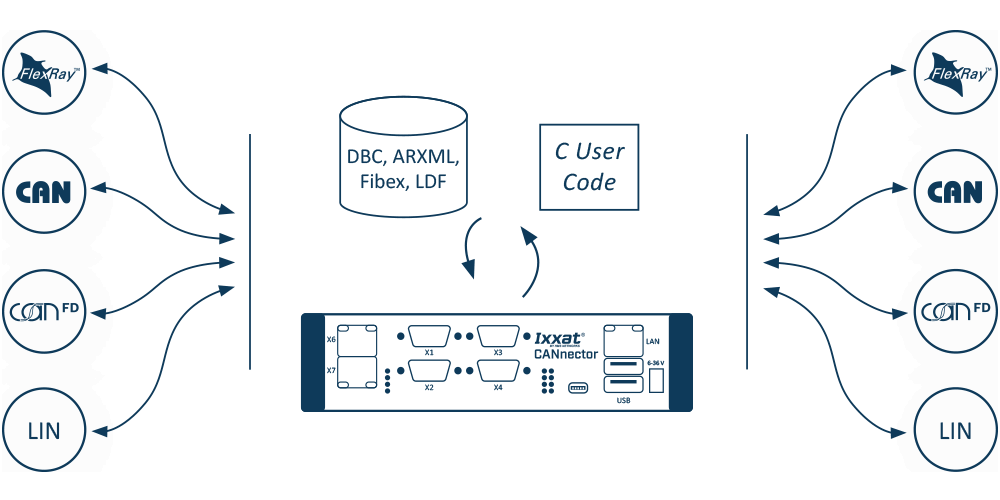
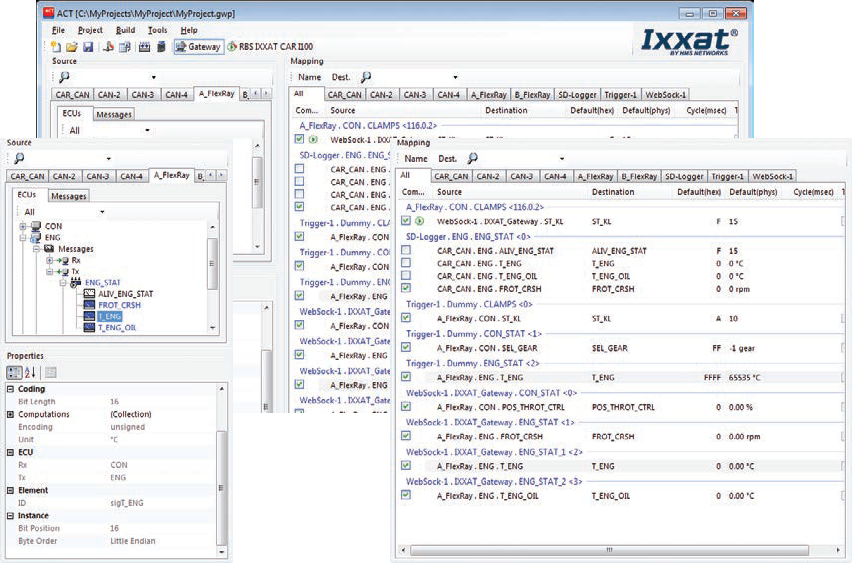
The gateway not only takes care of the data transfer from one CAN bus to another, but also makes it possible to connect "logical" bus systems - such as user code, data logger, Matlab / Simulink (option), etc. - with the overall data exchange . With this strategy it is possible to route each frame, PDU or signal from source to destination individually. This can be done directly or, for example, also via user code to manipulate the data on the fly.
This is possible by using the Gateway view of the ACT tool and using drag & drop to define the relationship between source and destination. Just drag the desired data from the source bus and drop it on the destination - irrelevant whether this is a real bus system or the user code, logger or something else. At the end, the created configuration can be loaded on an Ixxat embedded platform and run stand-alone. A bus description file can be provided for physical FlexRay, CAN and CAN FD bus systems. With the signal-based gateway, it is thereby possible to combine signals from different source messages into one target message. The FRC-EP and CANnector devices also provide analog or digital I/O ports. With ACT you can use these signals like any other signal in your configuration.
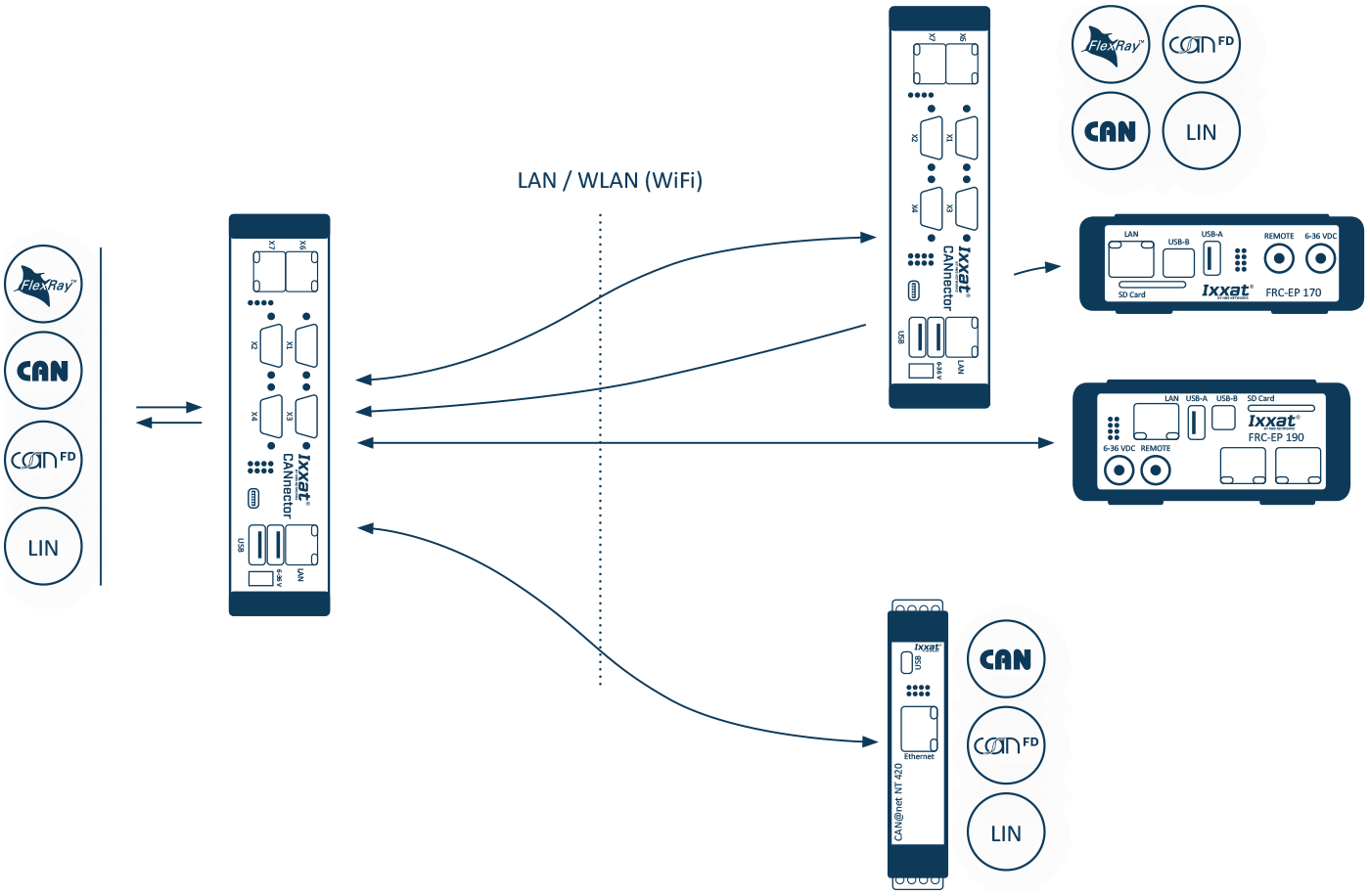
Ixxat’s Generic Ethernet protocol enables long-distance connections. Generic Ethernet is a virtual CAN (FD), FlexRay or LIN bus system on Ethernet. The desired data from / to the Generic Ethernet bus system can be mapped using ACT.
The data is then distributed over Ethernet and can be translated to the physical protocols using the CAN connector or FRC-EP series device. This is the classic range extender.
Up to 16 such virtual buses can be configured. This allows the desired data to be distributed not to one but to a maximum of 16 different IP addresses or ports. This makes it possible to create your own Ethernet-based communication network and simply use CAN (FD), FlexRay or LIN protocols on the last mile.
The Generic Ethernet protocol also allows the combination of Ixxat CAN @ net devices with CAN connector or FRC-EP series devices. This opens the possibility to expand up to a maximum of 136 CAN/72 CAN FD interfaces.
Voeg met behulp van ACT data logging-functionaliteit toe aan de configuratie. De loggerbus is een 'logische' bus binnen ACT die alleen gegevens kan ontvangen.
Any signal within the configuration - CAN (FD), LIN, FlexRay signal / frames, UserCode, etc. - can be assigned to the logger bus via drag and drop and then recorded to mass storage device, or the cloud, for later analysis . The logger supports:
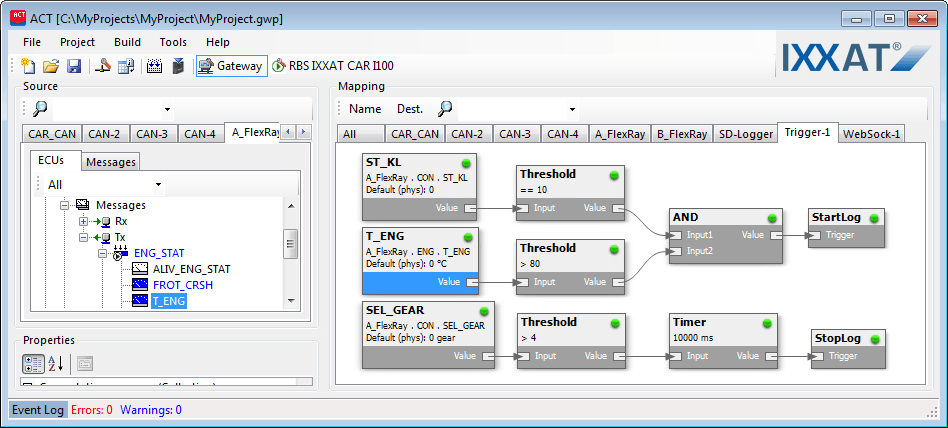
The trigger is a further logical bus which can be added to the ACT configuration. When added, every signal within the configuration can be mapped to the trigger bus by means of the drag & drop concept and being used as input signal. The trigger engine can be designed in a graphical manner. Several functional blocks can be used:
ACT allows for many different configurations, but of course does not offer all possible functionality. In that case, a configuration can be extended with its own C user code. For some users, the development of C code is too complex or there are already finished models from other projects. The integration of these models is possible via an API based on the user code bus. Similar to the user code, a Matlab/Simulink model can then access the mapped signals/messages. This option for ACT allows the integration of MATLAB/Simulink models into the overall configuration. If desired, ACT automatically generates a base model containing all the signals that will be exchanged. This basic model contains the API for the rest of the system and the signal transformation from raw to physical signal value depending on the definitions in the underlying bus description files. All that is required is design the desired functions with MATLAB / Simulink or copy the existing model and paste it into the base model. At the end, the executable module is automatically generated from this model and integrated into the overall configuration running standalone on the CANnector or FRC-EP series device.
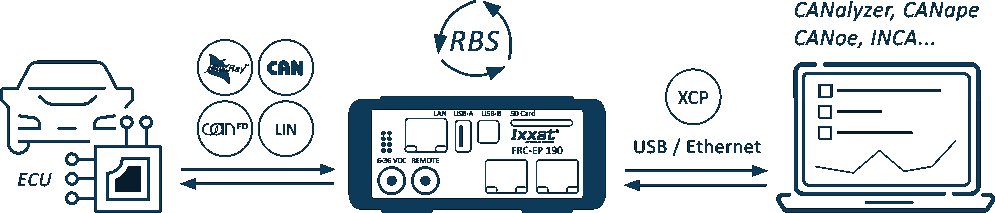
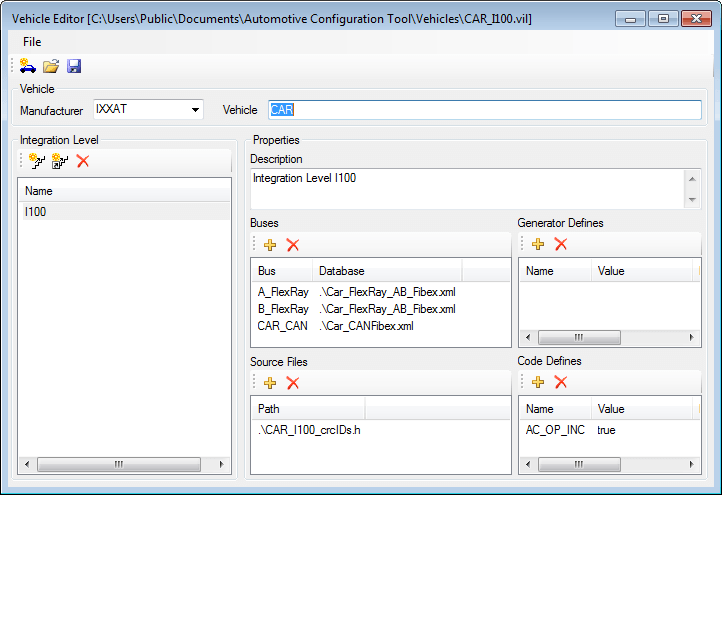
This is available for CANnector or from a FRC-EP series device with an EtherCAT extension. Within ACT, simple drag & drop can then be used to generate mappings from / to the EtherCAT slave. ACT also automatically generates a corresponding ESI file that can be used together with any suitable EtherCAT master to conveniently configure your EtherCAT network. The Fast Data Exchange protocol is an Ethernet-based communication interface and represents a favorable alternative to XCPonEthernet for accessing physical signals. DACT's RBS display provides a simulation environment for Electronic Control Units (ECUs) to test them independently from other network devices. Based on the FlexRay/CAN RBS and the XCPonEthernet extension, the signals sent by the RBS can be defined and manipulated. This includes, for example: The control of the signal manipulation can take place via user code, the gateway or XCPonEthernet. Administration tool for the embedded platform which is connected to the device via USB, Ethernet or Wi-Fi. Basis for most solutions are bus descriptions in CANdB, FIBEX or AUTOSAR-XML format. The descriptions contain a great deal of information, but often not all required information. Using the Vehicle Editor, everything that belongs to a certain vehicle, an integration level or a test configuration can be easily combined.Gateway
FlexRay, CAN & CAN FD
Analog & digital I/O
After configuring the data direction, range of values, conversion rules and units, the I / Os can be mapped easily via drag & amp; drop. This makes it possible to map trigger inputs/outputs of the logger or to fill in vehicle signals based on analog inputs.
Bridging
For the connection of the data stream directly to a PC, the VCI driver can be used to use the device as an external PC interface. The Generic Ethernet protocol is very easy to implement on any target operating system via a communication script. Datalogger
Trigger
By connecting these blocks, you are enabled to define a trigger logic which is then resulting in trigger signals as output of the trigger engine. These outputs are normal signals like any other signal in the configuration. They can be used to:
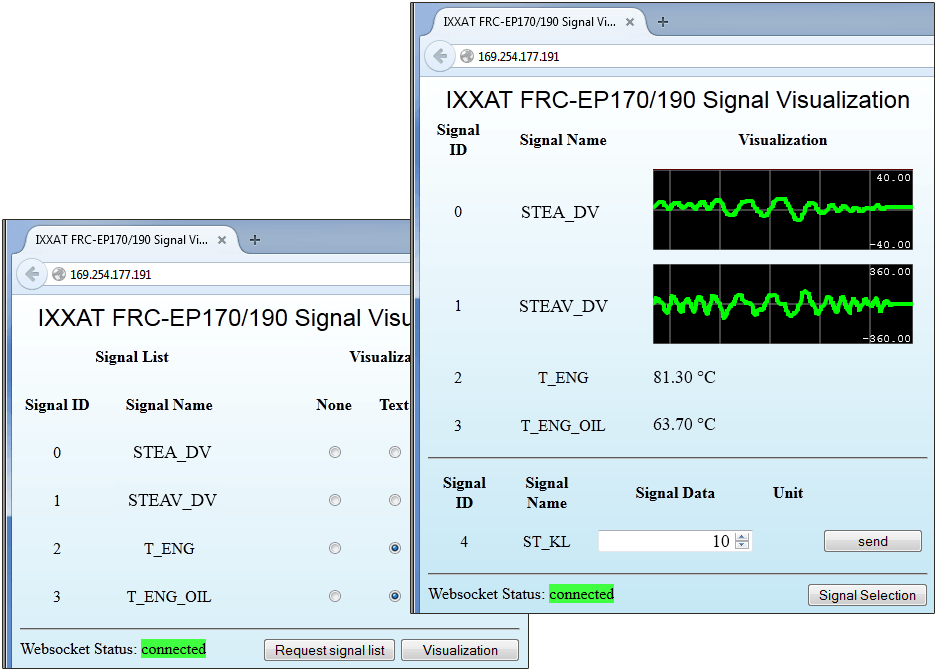
Signal visualization
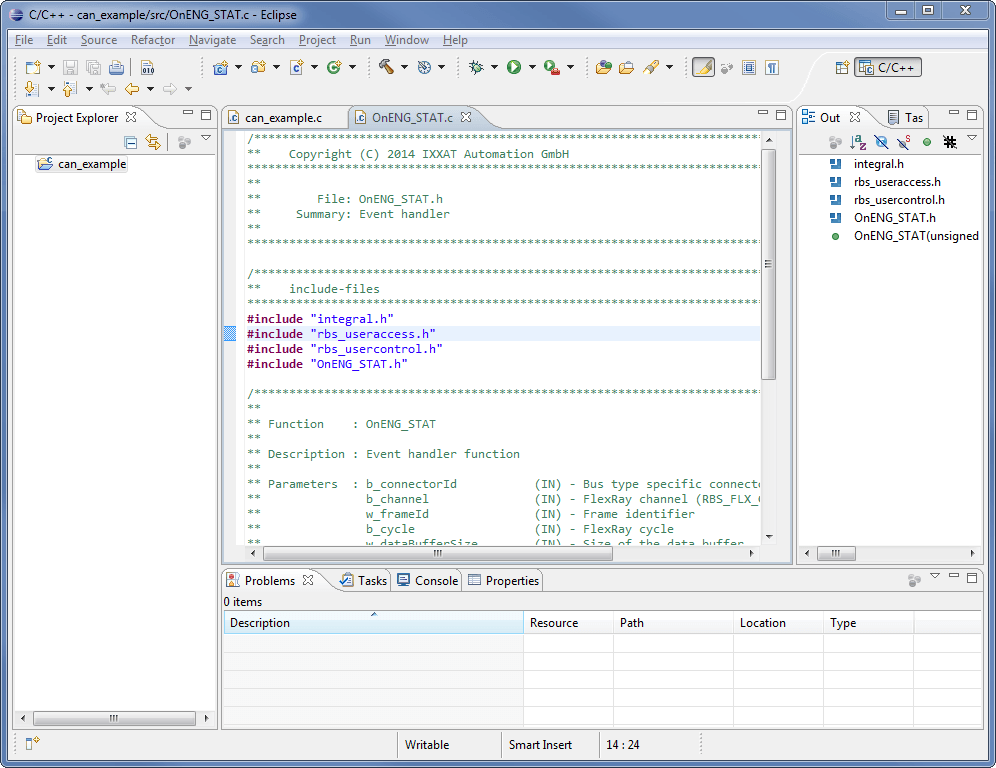
Development tool (UserCode)
An Eclipse-based development environment is available for the development of your own applications. Using this development environment, user code can be created for the extension of an ACT solution or for completely separate applications. ACT generates a C user code template that contains all the API to connect functions to the rest of the system. This is supported by the integration into the ACT project, the handy editor, cross compiler, as well as a high-level language debugger. The developed applications can be run stand-alone or on the Ixxat embedded systems. Functional models
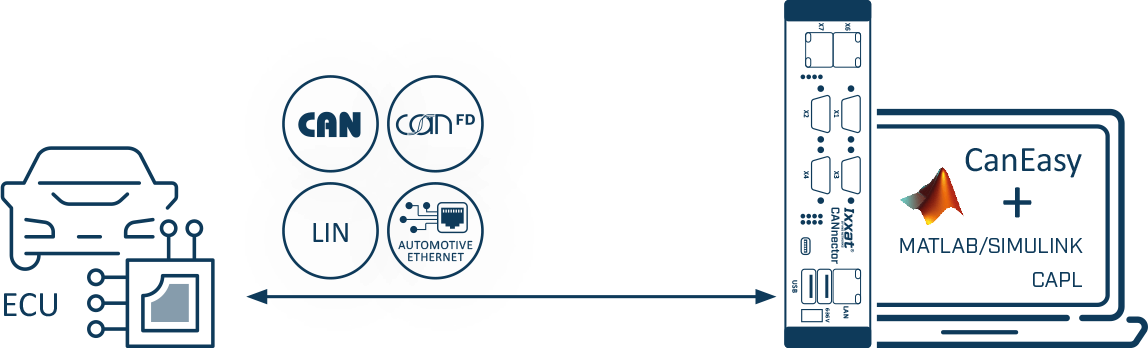
Matlab/Simulink & EtherCAT
MATLAB / Simulink
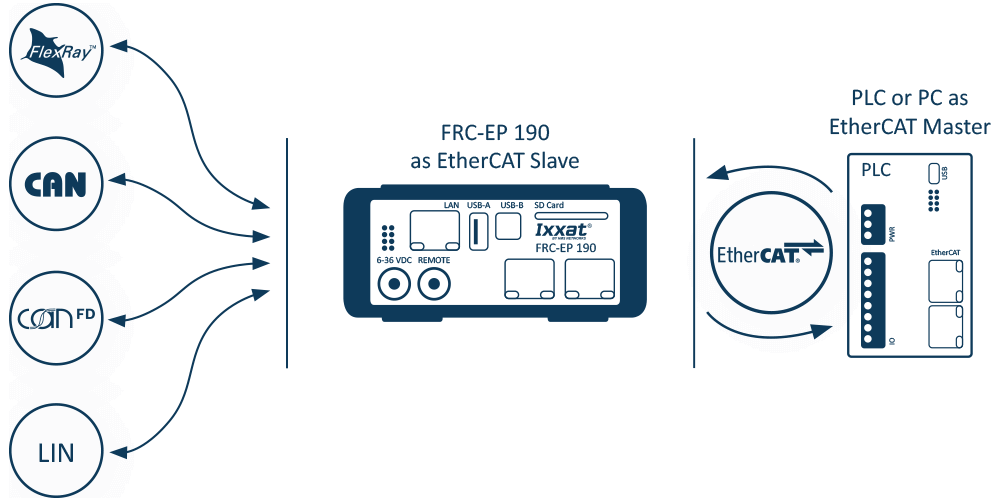
EtherCAT
Once connected to EtherCAT, all data - coming from the CAN (FD), Flexray or LIN bus system or from another EtherCAT based sensor or IO device - is synchronized and distributed on the same communication system to an SPS or PC to facilitate test execution. arrange for.
FDX
With ACT, all necessary signals are mapped from / to the FDX bus system via the drag & drop concept. ACT automatically generates the corresponding XML description file for the FDX bus. This XML file can be imported into the target software solution and is therefore immediately ready to read or send data.
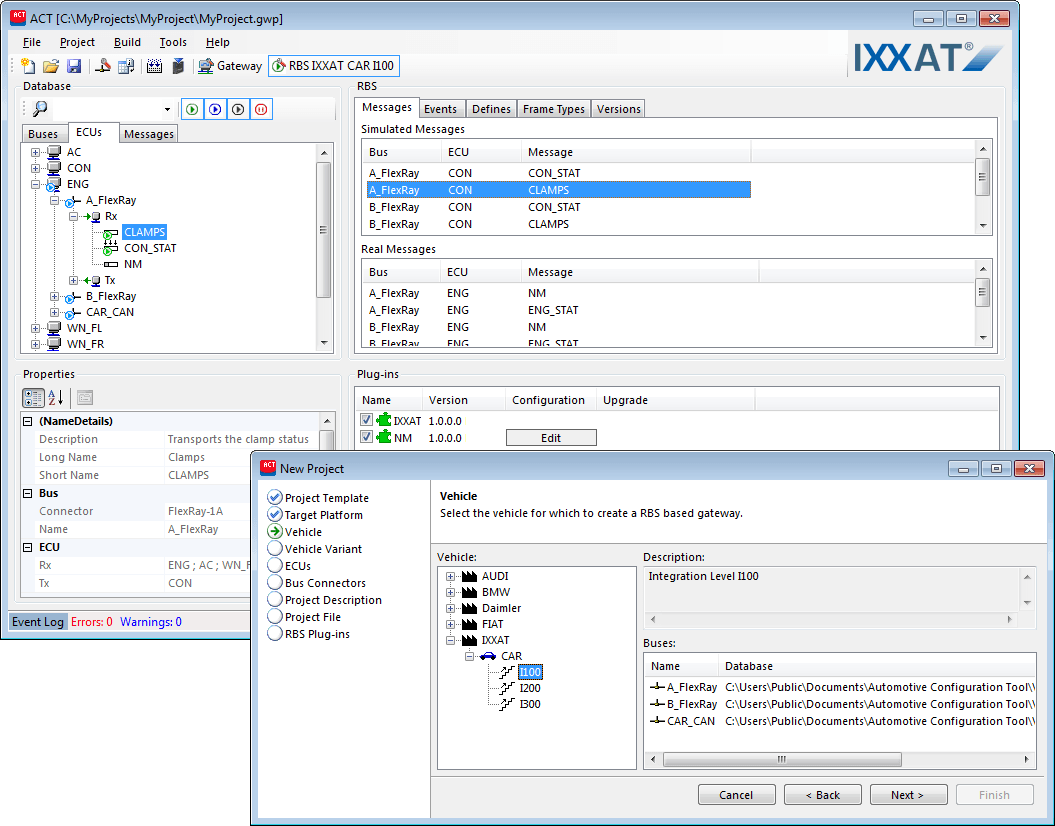
Residual Bus Simulation (RBS)
Our RBS is automatically generated using a vehicle description database defined with the integrated vehicle editor . Select the desired ECUs) and ACT builds the configuration:
XCPonEthernet
HIL signaal manipulation
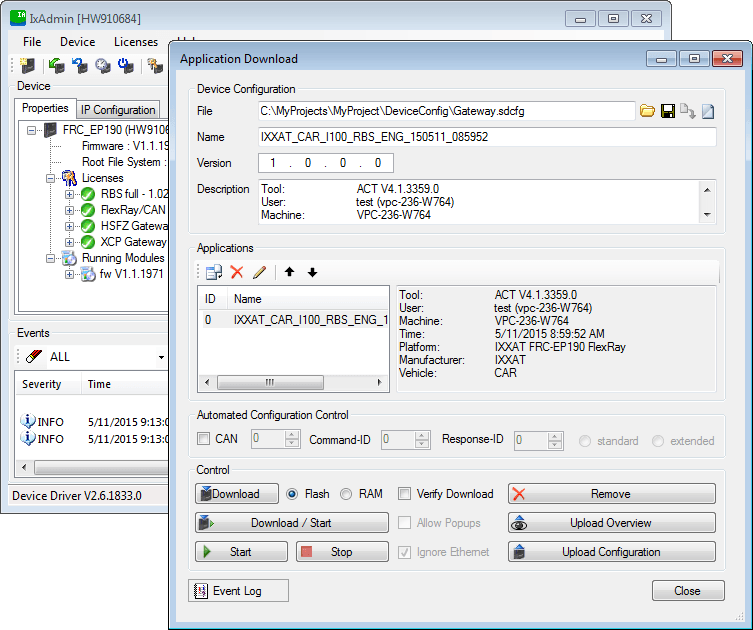
IxAdmin
Vehicle Editor
| Contents of delivery |
| - Programm for Windows™ |
| - USB license key (One USB 2.0 connection required) |
| - User Manual |
Part number(s)
Base, Logger, Gateway, EtherCAT and Residual Bus Simulation (RBS)
Note
For Gateway and RBS are run-time licenses on the Embedded Platform required