")
J1939 Protocol Software
Software package for the development of embedded J1939 Devices
Features and Benefits
- Developed according to MISRA-C:2012
- Tested against the compliance specification SAE J1939-82
- Suitable for the use with as well as without a real-time operating system
- Transmission and reception of application-specific messages (confirmed and unconfirmed)
- Support of the J1939 transport protocols:
- BAM (for broadcast communication)
- RTS/CTS (for peer-to-peer communication)
- Simultaneous communication with more than one node - Provides the address claiming procedure for single- and multi-address capable CAs
- Cyclic transmission and reception of messages with timeout monitoring
- Provides layer 2 communication (e.g. for ISO15765-3 message or proprietary J1939 messages with 11 bit identifiers)
- Support of request messages
- Modular design (not required features can be skipped to reduce memory requirements)
- The protocol software is dynamically configurable at runtime
- With the J1939 Designer the protocol software can be easily configured exactly to the needs of the application via a graphical user interface
J1939 Stack
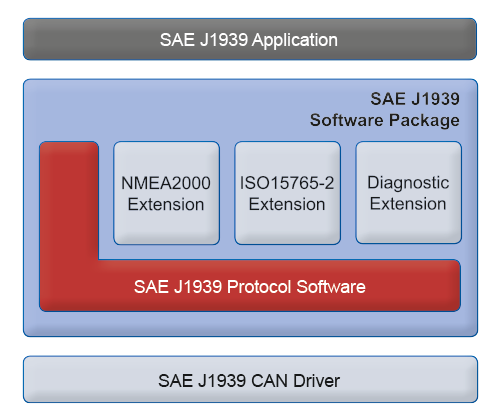
The SAE J1939 protocol software enables the quick and simple development of SAE J1939 devices. All communication mechanisms defined in the SAE J1939 specification (except for the bridge functionality) are available, which means that developers can fully concentrate on their application.
As the user interface is designed as a universal functional interface, the protocol software is simultaneously the basis for extensions such as Diagnostics (SAE J1939/73), NMEA 2000 or ISO 11783 (ISOBUS).
The J1939 protocol software is implemented in ANSI-C and is independent of the CAN controller, CPU and operating system (where available). It is adapted to the hardware via the CAN driver package, which is required in addition.
The user manual, API description and demo applications supplied allow a quick start-up of the SAE J1939 protocol software.
Versions of the J1939 Protocol Software
There are two versions of the SAE J1939 protocol software available:
- The single channel version is optimized for the use of just one software instance (CAN channel) and is therefore very good suited for low end CPUs (8 or 16 bit) with limited memory and only one CAN controller.
- The multi-channel version supports several software instances, whereby each instance can use a different CAN channel as well as all instances can use the same CAN channel (Virtual Mode).
The additional Ixxat J1939 CAN-driver is required for the use of one of the two versions of the J1939 protocol software.
| Contents of delivery |
| - Source code in C |
| - Example code in C |
| - Software user license |
| - Programming manual |
| - Technical support (time limited) |
Part number(s)
Ñote
The CAN Driver, which is required for operation, is not part of the delivery and must be ordered separate